Vr Mapping |
ON-LINE REFERENCE DOCUMENTATION CARDINAL SYSTEMS, LLC |
Model Precision (ModPre)
Type: Stereo Model Management
Measures the precision of models by walking the user through measuring a selected feature in all the models that show it. Model manager must be active to use this tool.
Detailed Description
The model precision allows a user to select a feature of interest in the current stereo model. It then searches for all other models that show that feature and open each in sequence to allow additional measurements of the same feature. After all observations have been made the comparison is reported in a textbox and optional to a file. In order to use the tool you must first open multiple models in the Model Manager (ModMan).
Procedure
1. Open multiple models in Model Manger (ModMan).
2. Open the Model Precision Application (ModPre). Optionally, before beginning the measure sequence, you can search for a better starting model using the "Center Model" and "Next Model" buttons.
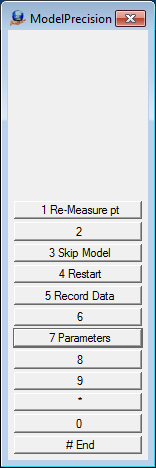
|
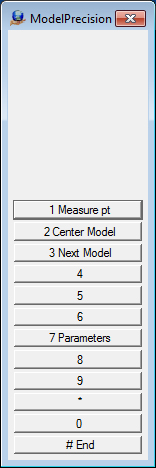
The model precision application menu.
|
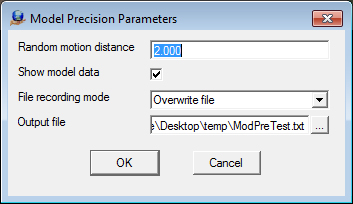
3. You may also wish to change the output parameters:
|
Parameters:
|
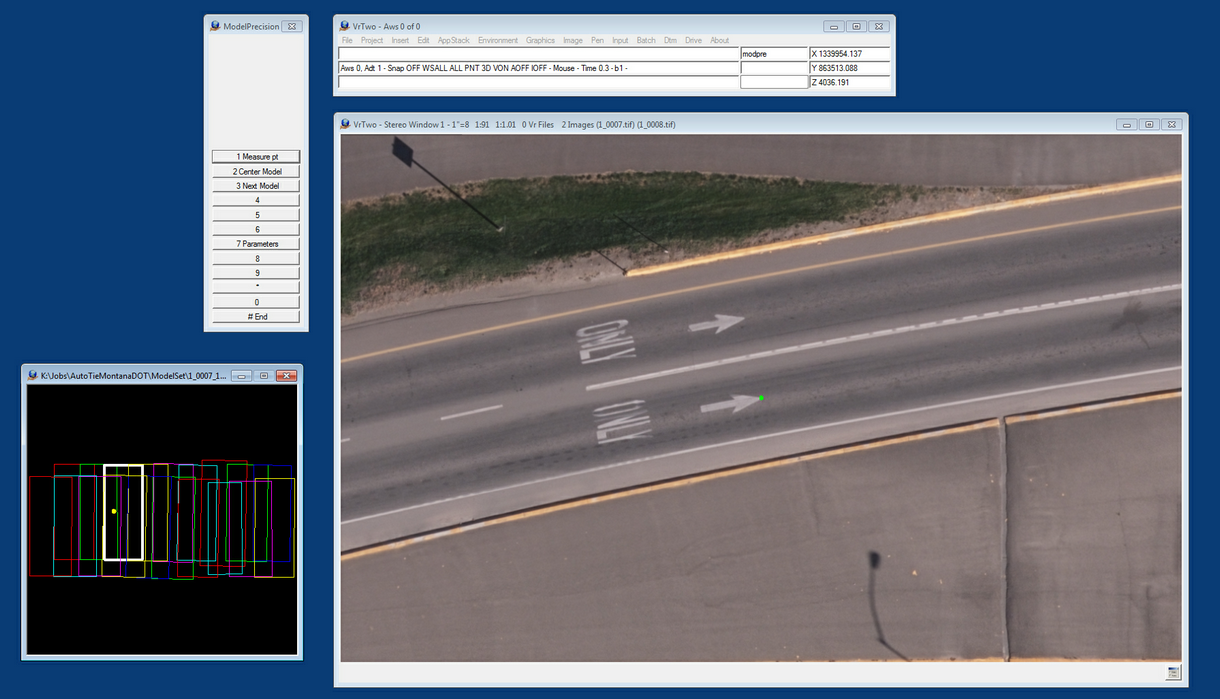
4. Pick a feature that can be repeatedly measured. In the example below the user pick the head of the traffic arrow.
5. After measuring the first feature the application will drive to other models for additional measurements. The menu options change for remeasurement of the feature.
|
Your progress through the stack of models is show on the main window as shown below.
|

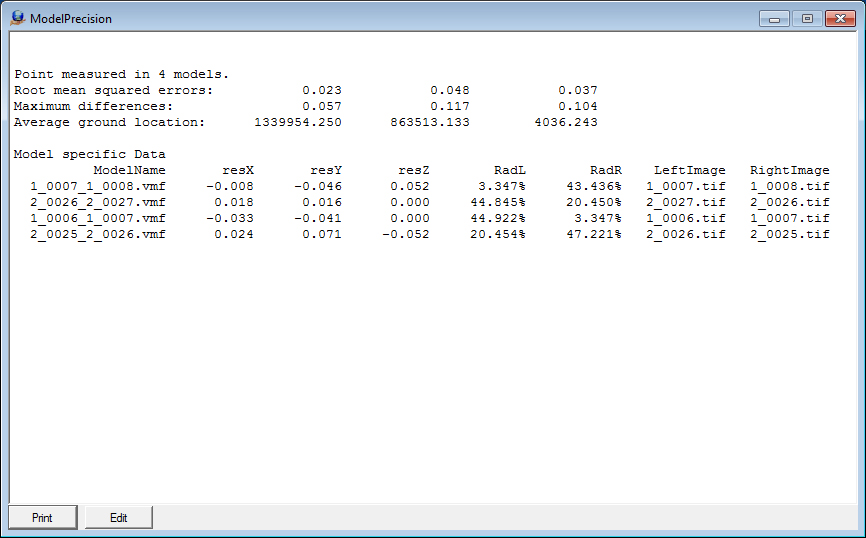
6. The precision statistics are shown in the text box (and optional saved or appended to a file). Below is an example with model specific data turned on. Root mean squared error, or RMSE, is with regard to the differences of individual measurements from the mean. The maximum differences are the maximum deviations from the mean in each axial direction. RadL and RadR are descriptions of how far a point was away from the center of the raw image. 100% is as far away as possible, 0% is exactly in the center.