Vr Mapping |
ON-LINE REFERENCE DOCUMENTATION CARDINAL SYSTEMS, LLC |
VR Camera Definitions and Editing
Type: Utility accessed from multiple VR programs.
All VR programs use this interface to define and edit cameras.
Overview
The camera calibration parameters relate the ideal model of a camera to the actual physical device. This information includes focal length, principal points, and lens distortion parameters. Extreme lens distortion is apparent when images of straight lines appear curved (this is common on lenses with short focal lengths). Even in cameras without obvious distortion calibration parameters are important in metric work.
Aerial mapping companies have historically have been spending between 300,000 and 1.5 million dollars on specially built cameras that hold these parameters in check. These metric cameras come with calibration reports. Non-metric cameras can be calibrated using Vr Camera Calibration.
The bundle adjustment also does camera calibration, but it is important to give it reasonable initial values.
Contents
To Setup a digital camera begin by setting the Camera type and setting the camera units as appropriate. Changing the camera units updates the units notations next to all the inputs to clarify what is expected. If editing an existing cameras these two fields will already be set and probably do not need to be changed.
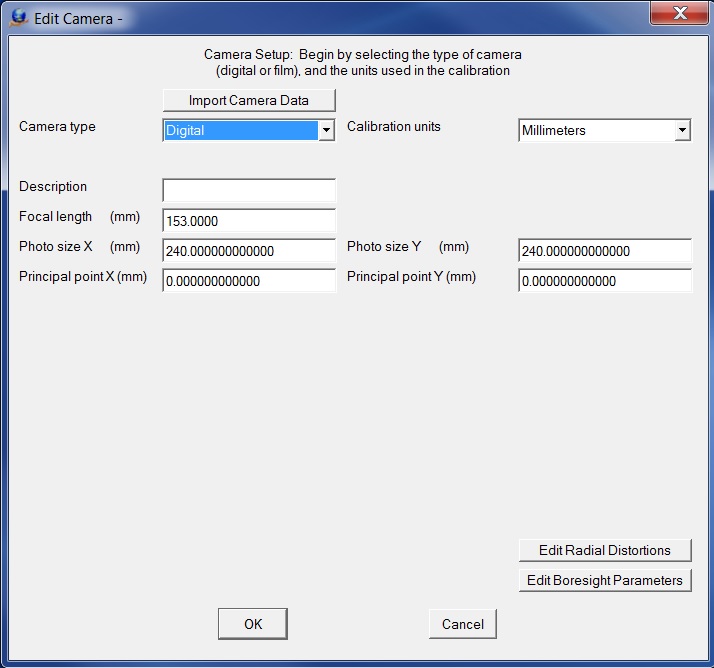
The Digital Camera dialog
Camera type - Defines the type of camera and determines the parameters to display in the dialog.
Calibration units - The coordinate and focal length units are typically defined as Millimeters (mm) or Pixels (px).
Description - A description of the camera may be provided for user convenience and does not affect how the software operates.
Focal length - Defines a fundamental description of the geometry of the bundle of rays captured by image and is usual provided by manufacturers of metric cameras. Non-metric camera users can estimate it from the lens size or use VR Camera Calibration to determine it. This parameter is entered in the calibration units (millimeters or pixels).
Photo size - The physical dimensions of the image sensor. This parameter is entered in the calibration units (millimeters or pixels).
Principal point - Describe the point of symmetry of the lens distortion. It is often provided by manufacturers of metric cameras, but never by manufacturers of non-metric cameras. In can be estimated to be (0,0) and then determined as part of a bundle adjustment in VR Aerial Triangulation or determined in Vr Camera Calibration. This parameter is entered in the calibration units (millimeters or pixels).
Edit Radial Distortions - Please see Lens distortion
Edit Boresite Parameters - The “boresight” parameters are typically used to describe the differences in the rotations of the sensor (such as camera) rotational axes and the rotational axes of the Inertial Measurement Unit (IMU), which is usually bolted to the camera body. These parameters are set to zero by default.
Note: Even though most of the fields in this dialog indicate millimeters (mm) as the parameter units, the units are entered as specified in the 'Calibration units' field which is Millimeters or Pixels.
To Setup a film camera begin by setting the camera type to 'Scanned film' and setting the camera units as appropriate, this is probably millimeters. Changing the camera units updates the units notations next to all the inputs to clarify what is expected. If editing an existing cameras these two fields will already be set and probably do not need to be changed.
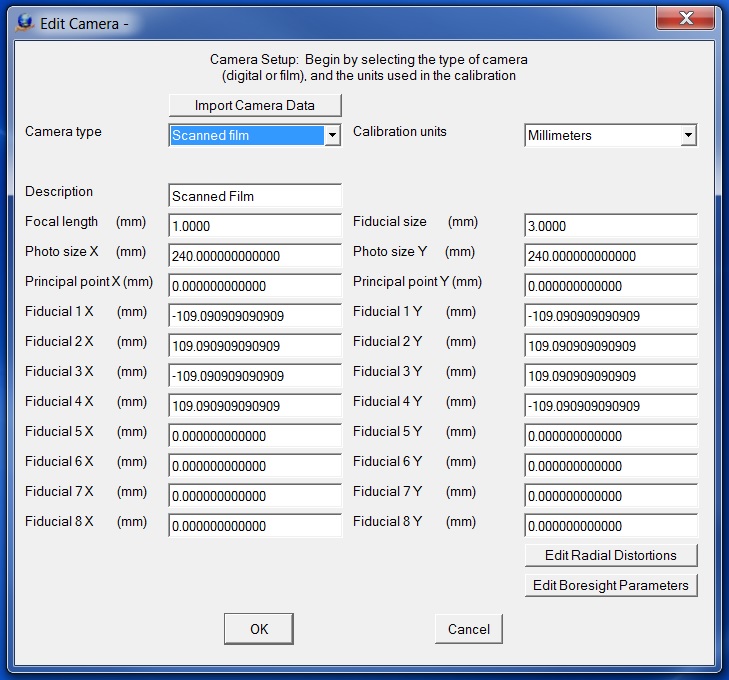
The File Camera dialog
Camera type - Defines the type of camera and determines the parameters to display in the dialog.
Calibration units - The coordinate and focal length units are typically defined as Millimeters (mm) or Pixels (px).
Description - A description of the camera may be provided for user convenience and does not affect how the software operates.
Focal length - Defines a fundamental description of the geometry of the bundle of rays captured by image and is usual provided by manufacturers of metric cameras. Non-metric camera users can estimate it from the lens size or use VR Camera Calibration to determine it. This parameter is entered in the calibration units (millimeters or pixels).
Photo size - The physical dimensions of the image sensor. This parameter is entered in the calibration units (millimeters or pixels).
Principal point - Describe the point of symmetry of the lens distortion. It is often provided by manufacturers of metric cameras, but never by manufacturers of non-metric cameras. In can be estimated to be (0,0) and then determined as part of a bundle adjustment in VR Aerial Triangulation or determined in Vr Camera Calibration. This parameter is entered in the calibration units (millimeters or pixels).
Fiducial n X and Y - Defines the coordinate positions for up to eight fiducial marks. Most aerial cameras have eight fiducial marks, and it is strongly recommended that all fiducial marks be used to compute the interior orientations. If there are less than eight fiducial marks (or you elect to use less) leave the undefined fiducial mark coordinates zeros. These parameters are entered in the calibration units (millimeters or pixels).
Edit Radial Distortions - Please see Lens distortion
Edit Boresite Parameters - The “boresight” parameters are typically used to describe the differences in the rotations of the sensor (such as camera) rotational axes and the rotational axes of the Inertial Measurement Unit (IMU), which is usually bolted to the camera body. These parameters are set to zero by default.
Note: Even though most of the fields in this dialog indicate millimeters (mm) as the parameter units, the units are entered as specified in the 'Calibration units' field which is Millimeters or Pixels.
To Setup a RPC camera select the 'Camera type" to RPC
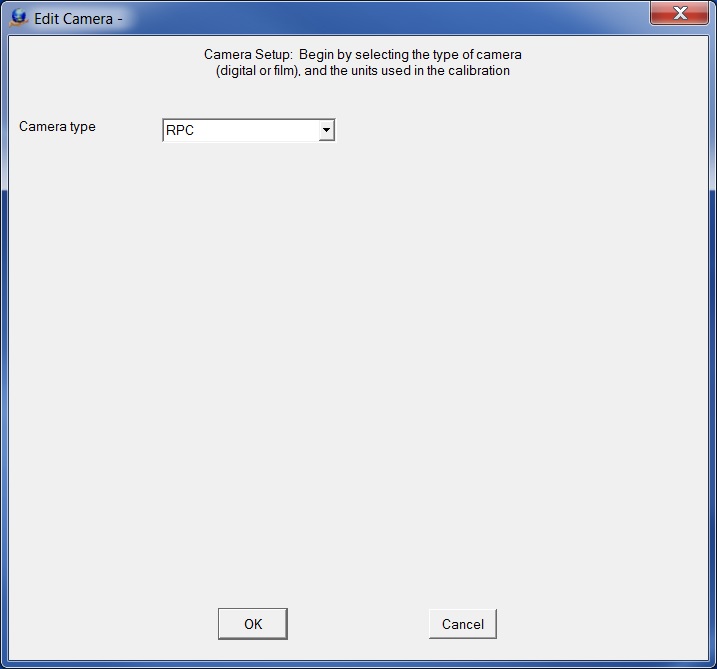
The RPC dialog
Notice that there are no parameters. RPCs (rational polynomial coefficients) encode not only the exterior orientation of images but their interior orientation and camera parameters as well. The only reason a camera is even created is as a place holder. The Vr software requires that images be assigned a camera, so here a dummy camera is used. This serves the purpose of telling the software to expect/require an RPC data file for this image.
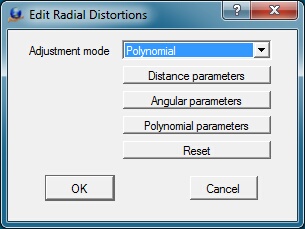
Lens distortion causes imaged positions to be displaced from the ideal or true locations. In aerial cameras these distortions are normally minimal but can still have an effect on accuracy. Some of the digital cameras have large lens distortions and radial distortions must be entered for accurate mapping results.
Adjustment mode - There are two methods of representing radial distortions which are by distance or with polynomial values. Most camera calibration programs output radial distortions values as polynomial parameters. The Angular option is currently not supported.
Distance Parameters
Radial distortions that are represented as concentric rings about the camera lens calibrated principal point may be entered as distance parameters. The radial distortions shown below are from a small format camera.
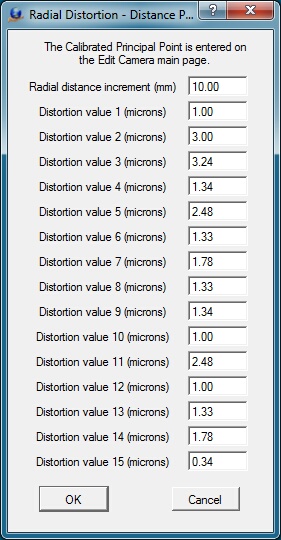
Defining radial distortions by distance
Radial distance increment - Represents the distance between the concentric rings that make up the distance parameters. Radial distance increment units should be the same as those used for Fiducial positions.
Distortion values - Specifies distortion values for each distance. There may be up to 15 values. Distortion value units should be the same as those used for Fiducial positions.
Angular Parameters
The Angular Parameters are currently unsupported.
Polynomial Parameters
The mathematical model used is based on the Simultaneous Multi-camera Analytical Calibration (SMAC) method as defined by the USGS. Care should be taken when entering these parameters, as entry errors cause model orientation errors and distortions which affect model accuracy. For metric cameras these values should be provided in a calibration report. For non-metric cameras they can be determined in VR Camera Calibration or assumed zero and calculate as part of the bundle adjustment.
Up to five symmetric radial distortion coefficients (K values) can be defined. Unused (undefined) K values should be left zero.
Up to four decentering coefficient values (P Values) can be defined. Unused (undefined) P values should be left zero.
The K and P values are entered into the Polynomial Parameters dialog box in exponential notation. The values entered from the USGS camera calibration report may have the decimal place moved one position to the left depending on the number entered. For example:
USGS value: 0.1403x10-3
Value typed: .1043e-3
Shown value: 1.403000e-004
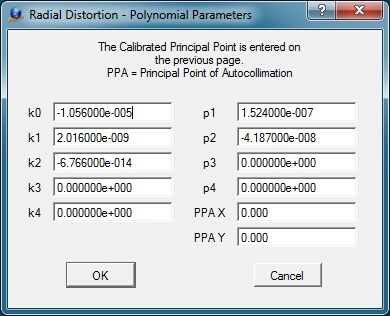
The Radial Distortions dialog box for entering the polynomial parameters
If supported, a camera file should be imported to avoid transcription errors and other frustrations. Various formats are supported, but several of them have only partial definitions and some values must still be manually entered. Finally, some camera formats cannot be translated into VR exactly. Please read the documentation carefully. Also, file formats from other software do change periodically, if you have an issue please send an email to support@cardinalsystems.net and we will get it fixed.
All camera importing is done using the 'Import Camera Data' located near the top of the camera edit dialog.
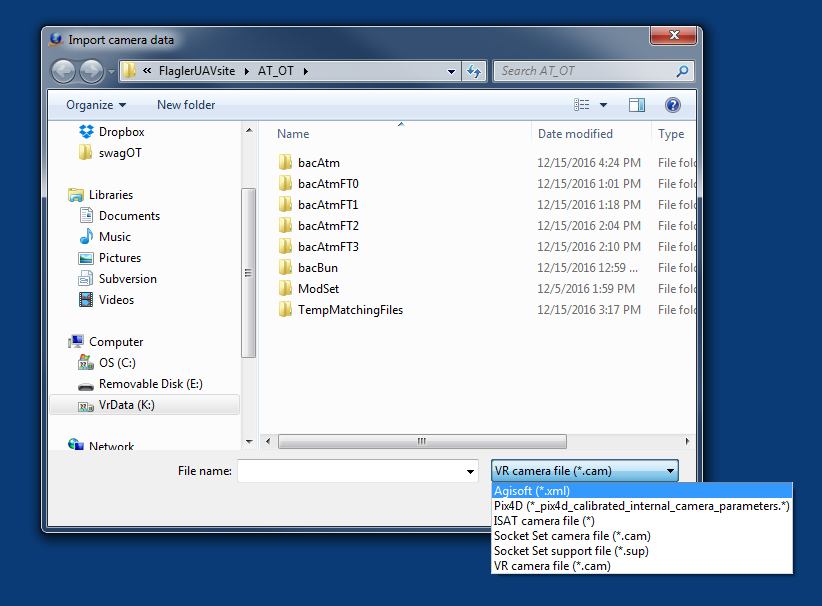
Import Camera dialog
The type of camera is selected from file type combo box near the bottom right of the windows file open dialog.
Agisoft camera files are among those that are not translated exactly into VR. The camera definition is complete, but includes multiple focal lengths and skew parameters that are not currently supported. If importing from Agisoft it is recommended that you import the block measurements and run a bundle in VR AT to compensate for this.
File Format:
<sensors>
<sensor id="0" label="ILCE-5100 (20 mm)" type="frame">
<resolution width="6000" height="4000"/>
<property name="pixel_width" value="4.0000000000000010e-003"/>
<property name="pixel_height" value="4.0000000000000010e-003"/>
<property name="focal_length" value="2.0000000000000000e+001"/>
<property name="fixed" value="false"/>
<calibration type="frame" class="adjusted">
<resolution width="6000" height="4000"/>
<fx>5.2542324878152913e+003</fx>
<fy>5.2548648186137489e+003</fy>
<cx>2.9641988929952763e+003</cx>
<cy>1.9857667758296288e+003</cy>
<skew>7.0995629195644328e-001</skew>
<k1>-1.6570203169850198e-001</k1>
<k2>1.6255130389270986e-001</k2>
<k3>-1.6184373209953556e-002</k3>
<p1>2.7834959305479836e-004</p1>
<p2>-7.6558212510163196e-004</p2>
</calibration>
</sensor>
</sensors>
The Datumate camera information is stored in the Datumate .ori files. There is a .ori file for each photo that was used by Datumate. Any .ori file may be selected if a single camera was used for the entire project. If multiple camera were used then this procedure would be repeated for each camera. If multiple cameras were used when the .ori files might need to be viewed to determine a .ori file for each camera. A fully functional camera definition will be imported, but a description can be added for convenience.
The Datumate camera import does not import radial distortions and the resulting camera file has the radial distortions turned off.
File format:
$ImageID___________________________________________________(ORI_Ver_1.1)
C:\Users\efusco\Documents\DatuGram3D\Jobs\4437 Edgewood2\DJI_0042.JPG
$IntOri_FocalLength_________________________________________________[mm]
3641.03399123682
$IntOri_PixelSize______(x|y)________________________________________[mm]
1.0 1.0
$IntOri_SensorSize_____(x|y)_____________________________________[pixel]
4864 3648
$IntOri_PrincipalPoint_(x|y)_____________________________________[pixel]
2430.13821103775 1829.13666785524
$IntOri_CameraMatrix_____________________________(ImageCoordinateSystem)
3641.03399123682 0.0 2430.13821103775
0.0 3641.03399123682 1829.13666785524
0.0 0.0 1.0
$ExtOri_RotationMatrix____________________(World->ImageCoordinateSystem)
-0.0221952154000378 -0.99974523079716 0.00410437713666893
-0.999702089254286 0.0222355802304079 0.010065371946993
-0.0101540708073241 -0.00387975130017045 -0.999940919442688
$ExtOri_TranslationVector________________________(WorldCoordinateSystem)
2499566.78335786 7104704.29847965 1009.9040071593
$IntOri_Distortion_____(Model|ParameterCount|(Parameters))______________
BROWN5 5 0.00919791907365037 -0.0261102747197858 0.0268052984509787 0.000457924221920482 -0.000448249900254116
$Rectification_Method______________________________________________________
NONE
Pix4D is among those formats that cannot be exactly duplicated. I appears that they use some kind of irregular distortion grid internally, but only export a SMAC like set of polynomial parameters. If importing from Pix4D it is recommended that you import the block measurements and run a bundle in VR AT to compensate for this.
File format:
Pix4D camera calibration file 0
#Focal Length mm assuming a sensor width of 6.31747999999999976239x4.73810999999999982180mm
F 3.73320024386105409064
#Principal Point mm
Px 3.15119568290642693142
Py 2.38913699995431461076
#Symmetrical Lens Distortion Coeffs
K1 -0.01268751795503417212
K2 0.00500201292706088565
K3 0.00883570912425699420
#Tangential Lens Distortion Coeffs
T1 0.00006907855258670360
T2 0.00007440408018383493
There are two support flavors of Socket set camera files. Both contain the same data, but their formatting is quite different. Both are missing the camera photo (chip) size, which must be manually added to complete the camera definition.
SocketSet Camera File, Flavor1:
Focal Length (mm)
-208.205000
Principal Point Offset xpoff ypoff in mm
-6.0000000000000001e-003 -2.0000000000000000e-003
How many fiducial pairs (max 8):
8
Fiducial x,y pairs in mm
106.004000 -106.008000
-105.999000 -105.998000
-106.004000 106.005000
106.002000 106.002000
0.003000 -109.992000
-109.996000 0.003000
-0.004000 109.997000
109.998000 -0.002000
Symmetrical Lens Distortion Odd-order Poly Coeffs c0,c1,c2,c3 (c0=offset)
0.000e+00 0.0000000000000000e+000 0.0000000000000000e+000 0.0000000000000000e+000
Decentering Lens Coeffs p1, p2, p3
0.0000000000000000e+000 0.0000000000000000e+000 0.0000000000000000e+000
How many distortion pairs (max 20):
0
Distortion Data Units (m=radial dist in mm, d=field angle in deg):
m
Distortion Data Pairs, if any (Radius in mm or deg, Distortion in Microns):
Socket Set Camera, Flavor 2:
camera_calibration_file 1
#Focal Length (mm)
FOCAL 92.000500
#Principal Point Offset xpoff ypoff in mm
XPOFF 3.000000e-003
YPOFF 2.000000e-003
#Principal Point symmetry xsoff ysoff in mm
XSOFF 0.000000e+000
YSOFF 0.000000e+000
#How many fiducial pairs (max 8):
NUM_FIDS 4
#Fiducials position
DATA_STRIP_SIDE left
#Fiducial x,y pairs in mm:
FID_PAIRS
-39.603200 -43.545600
39.603200 43.545600
-39.603200 43.545600
39.603200 -43.545600
#Symmetrical Lens Distortion Odd-order Poly Coeffs:K0,K1,K2,K3
SYM_DIST 0.000000e+000 0.000000e+000 0.000000e+000 0.000000e+000
#Decentering Lens Coeffs p1,p2,p3
DEC_DIST 0.000000e+000 0.000000e+000 0.000000e+000
#How many distortion pairs (max 20):
NUM_DIST_PAIRS 0
#Distortion Data Units (m=radial dist im mm, d=field angle in deg):
DIST_UNITS m
#Distortion Data Pairs, if any (Radius in mm or deg, Distortion in Microns)
DIST_PAIRS
SocketSet Support File Camera Import
Socket Set camera data is also found in the support files. The data here is not as complete. There are not fiducial coordinates (for film cameras) or a photo size. However, some software does camera calibration during the bundle adjustment and records the tweaked focal length, etc. in the support files. Importing a support file will update the changed values. If creating a camera from a support file care should be taken to manually set the fiducial coordinates (if a film camera) and the photo size.
Socket Set Support File:
support_file d
IMAGE_ID "613020_206_115"
IMAGE_FILE_NAME 1 "d:\stereo_rfp\dataset1_film\scans\613020_206_115.img"
LINES 16576
SAMPLES 16576
RECTIFICATION_TERMS
0.00000000000000e+000 0.00000000000000e+000 1.00000000000000e+000
0.00000000000000e+000 1.00000000000000e+000 0.00000000000000e+000
GRND_BIAS 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000
BIAS 0.000000 GAIN 1.000000
GROUND_ZERO 3.98854531019135e+006 4.35194217455687e+005 2.67353727151535e+003
LOAD_PT 3.98854531019135e+006 4.35194217455687e+005 2.67353727151535e+003
COORD_SYSTEM 6
UNITS 1
USE_FAST_MATH 0
MAX_AND_MIN_ELEVATION 0.0 1000.0
IMAGE_MOTION 0
INITIALIZED 2
STATUS 0
QUALITY 53
SENSOR_TYPE FRAME
FOCAL 2.08205000000000e+002
IOCOEF_LINE -1.56472108149629e+001 7.13940026073314e+001 -4.37494679097658e-001 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000
IOCOEF_SAMPLE -1.54474111419888e+001 4.25912380706273e-001 7.13946648078216e+001 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000
OPK_LSR -8.28834522463146e-003 -2.65238839172880e-002 -1.53268429353673e+000
LSR_CAMERA -1.41202811810784e+001 -4.52335264346011e+003 7.62697206937887e+003
X0Y0Z0_GEO 6.29715707011150e-001 -1.84514880423643e+000 0.00000000000000e+000
AZIMUTH_LSR 0.00000000000000e+000
ATMREF 0
ATMCO 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000
ABERR 0
USE_LENS_DISTORTION 0
LENSCO 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000
XPOFF -6.00000000000000e-003
YPOFF -2.00000000000000e-003
ELLIPSOID NAD_83
VERTICAL_REFERENCE 1
A_EARTH 6.37813700000000e+006
E_EARTH 8.18191910434947e-002
ELLIPSOID_CENTER 0.00000000000000e+000 0.00000000000000e+000 0.00000000000000e+000
PROJECTION_TYPE UTM_PROJECTION
ZONE 13
FALSE_NORTHING_POS 0.0000000000000000e+000
FALSE_NORTHING_NEG 0.0000000000000000e+000
FALSE_EASTING_POS 5.0000000000000000e+005
FALSE_EASTING_NEG 5.0000000000000000e+005
GRID_NAME UTM_13N
Importing VR's native camera format is straight forward. The camera definition is complete and no speacial considerations are required.
File Format:
# VrTwo Camera File
# 14-Jul-2010 00:51:06
#
# FILENAME - Parameter file name
# DESC - Camera description
# FOCALLEN - Focal length (Fiducial units)
# FIDSIZE - Fiducial size (Fiducial units)
# FIDUNITS - Fiducial units (0=mm 1=in 2=pixels)
# FIDCOUNT - Number of fiducials used (4 | 8)# PHOTOSIZEX - Photo size X (width) (Fiducial units)
# PHOTOSIZEY - Photo size Y (height) (Fiducial units)
# PPOX - Calibrated principal Point X (Fiducial units)
# PPOX - Calibrated principal Point Y (Fiducial units)
# FID - Fiducial coordinates
# RADDIST - Radial distortion Angle Distance DistortValue
FILENAME "K:\Jobs\ManAtControl\man_rc10.cam"
DESC "man_rc10"
FOCALLEN 152.67300000
FIDSIZE 3.00000000
FIDUNITS 0
FIDCOUNT 4
PHOTOSIZEX 240.00000000
PHOTOSIZEY 240.00000000
PPOX 0.00100000
PPOY -0.00700000
FID 0 -105.99200000 -105.99300000
FID 1 106.01700000 106.00500000
FID 2 -105.98600000 106.01600000
FID 3 105.99100000 -105.99300000
FID 4 0.00000000 0.00000000
FID 5 0.00000000 0.00000000
FID 6 0.00000000 0.00000000
FID 7 0.00000000 0.00000000
#
# Radial distortion parameters
#
Mode 0
Dis_Incr 10.000
Dis_Distort 0 0.00000
Dis_Distort 1 0.00000
Dis_Distort 2 0.00000
Dis_Distort 3 0.00000
Dis_Distort 4 0.00000
Dis_Distort 5 0.00000
Dis_Distort 6 0.00000
Dis_Distort 7 0.00000
Dis_Distort 8 0.00000
Dis_Distort 9 0.00000
Dis_Distort 10 0.00000
Dis_Distort 11 0.00000
Dis_Distort 12 0.00000
Dis_Distort 13 0.00000
Dis_Distort 14 0.00000
Dis_Distort 15 0.00000
#
Ang_Angle 0 0.00000
Ang_Angle 1 0.13090
Ang_Angle 2 0.26180
Ang_Angle 3 0.39619
Ang_Angle 4 0.52360
Ang_Angle 5 0.61087
Ang_Angle 6 0.69813
Ang_Angle 7 0.00000
Ang_Angle 8 0.00000
Ang_Angle 9 0.00000
#
Ang_Distort 0 0.00000
Ang_Distort 1 0.00000
Ang_Distort 2 0.00000
Ang_Distort 3 0.00000
Ang_Distort 4 0.00000
Ang_Distort 5 0.00000
Ang_Distort 6 0.00000
Ang_Distort 7 0.00000
Ang_Distort 8 0.00000
Ang_Distort 9 0.00000
#
k0 0.000000e+000
k1 0.000000e+000
k2 0.000000e+000
k3 0.000000e+000
k4 0.000000e+000
p1 0.000000e+000
p2 0.000000e+000
p3 0.000000e+000
p4 0.000000e+000
xipp 0.000000
yipp 0.000000